2020年 ◆優秀作品 ◆三松社賞
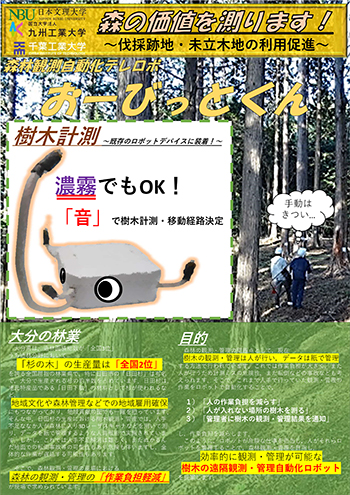
森林観測自動化テレロボ「おーびっとくん」
| チーム名: | Tree |
| メンバー: | ○大里 一矢(日本文理大学 大学院 環境情報学専攻 2年) |
| 比嘉 祐揮(日本文理大学 工学部 情報メディア学科 3年) | |
| 林 友哉(日本文理大学 工学部 情報メディア学科 3年) | |
| 沖田 和久(日本文理大学 工学部 情報メディア学科 3年) | |
| 川邉 拓馬(日本文理大学 工学部 情報メディア学科 3年) | |
| 山下 涼介(日本文理大学 大学院 環境情報学専攻 1年) | |
| 荻本 琢司(九州工業大学 大学院 工学府 博士前期課程工学専攻 1年) | |
| 石川 直生(千葉工業大学 大学院 工学研究科 未来ロボティクス専攻 2年) | |
| 上原 正志(千葉工業大学 大学院 工学研究科 工学専攻 博士後期課程4年) |

二次審査講評:
■審査委員長 谷川 民生(国立研究開発法人産業技術総合研究所インダストリアルCPS研究センター 研究センター長(ロボメカ部門 部門長))
複数の大学の仲間で提案している連携提案であり、デザインの多様性を求めるには、参加者の多様性も重要です。
森林観測という点では、ドローンによる観測方法もあり、若干、自身の研究しているロボットに引っ張られてしまった感があると思いました。
新しいデザインを考えるときこそ、一旦、自身の研究を否定してから考えることが重要です。
木を音で計測するというアイデアは興味深く、研究としても面白い課題だと思いました。
■審査委員 加藤 優(九州産業大学芸術学部 非常勤講師)
森林資源の把握とその管理を自動化するという目的のために、音を使った3次元空間計測による樹木地図情報(相対位置、移動経路)および樹木品質情報の取得、FuRoプラットフォームの採用、などの各専門分野について緻密に考えられた成果が集められた、まさに3校のコラボが大変良く機能した結果と言える提案だったと思います。
欲を言えばFuRoプラットフォームと合体したデザインに現場への人力による搬入作業がしやすい工夫(取っ手など)や日田杉のイメージ(?)などが考慮されていればさらに魅力的となったでしょう。
私の中では同率1位でした。
優秀賞おめでとうございます。
■審査委員 田中 久生(福岡市科学館 サイエンスコミュニケーター)
多数の大学と連携するメリットを感じる内容でした。
移動用のfuRoプラットフォームについては稼働している映像がプレゼンされていたため非常に説得力を感じました。
また,問題に対する背景や解決のためのロボット,その技術についてもプレゼンされていたため,実現化へむけた想いをしっかりと感じました。
プラットフォームの移動速度や樹木測定に係る時間などの内容もプレゼンされていると,より説得力を感じたと思います。
■審査委員 筬島 修三(一般社団法人九州経済連合会 企画調査部長)
森林の観測・管理をドローン(空から)ではなく、地面から行い、大分県特有の濃霧時で視界が悪い時も音で「測る」というもの。
足回りもしっかりしており、完成度の高い提案だったと思います。
また3大学の連合チームで、それぞれの強みを活かして作り上げたロボではないでしょうか。
こういった連合チームがもっと増えていくことを期待しています。
■審査委員 永里 壮一(メカトラックス株式会社 代表取締役)
・複数大学のチームで素晴らしい
・背景から課題・目的へのアプローチが分かりやすかった
・fuRoに載せるのは、実現性の担保の点で素晴らしいが反則な気もする(笑、とはいえ車輪の再発明しないのはとても良いこと)
・最短経路探索についての説明は分かりやすかった
・樹木計測の音響測距法の説明も良かったが、実験結果などもあればさらに良かった
・「山の在庫管理」のコピーはとても良い(こういう分かりやすいワンフレーズはとても大事と思います)
・ドローンではなくクローラを使った理由の説明がもう少し欲しかった(人の場合との比較データは良かった)
■審査委員 田名部 徹朗(株式会社 三松 代表取締役)
三松賞受賞おめでとうございます。
チームメンバーが分散しているハンディを克服し、テーマ選定のための調査、きめ細かな分析、地道な技術検証をそれぞれの得意分野を活かして見事に解決策を提示した団結力と実行力が選定の理由です。
林業の衰退が叫ばれて久しい日本ですが、衰退の原因となったポイントを分析し、それを先端技術の力で儲かる事業となすことで林業と緑を生き返らせるプランは秀逸と思います。
ぜひ実現に向けて進めていただきたいと思っています。
一次審査講評:
・カメラなしで,どのようにして樹木の質や種類などを特定するのでしょうか.
・音声情報処理について説明が欲しかった.
・肝心の樹木サイズの計測手法が不明瞭に思いました.
・ロボットの必要性や背景,メカニズムなどしっかり説明されていて説得力があると思います.
・移動経路をどうやって決定するのか?
・自動で樹木を計測する.
・音波だけで位置や樹木の質や種類をどのように計測するのかの仕組みについて説明が欲しいです.
・走行中にロボット自身が発するモータ音を利用して樹木計測を行う点が面白いと思いました.既存のローバやドローンに搭載して利用できるので応用範囲が広く実用性が高いと感じました.